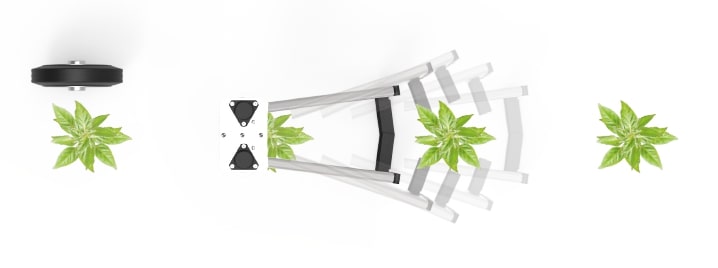
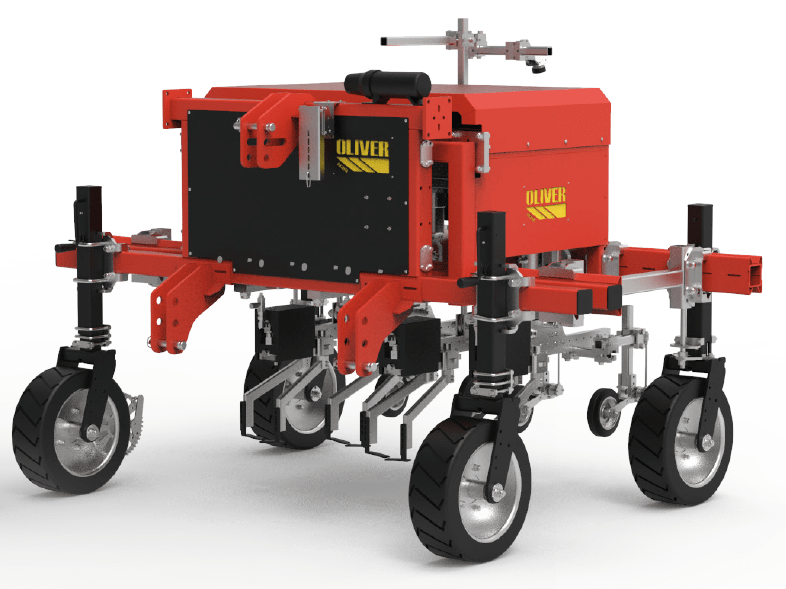
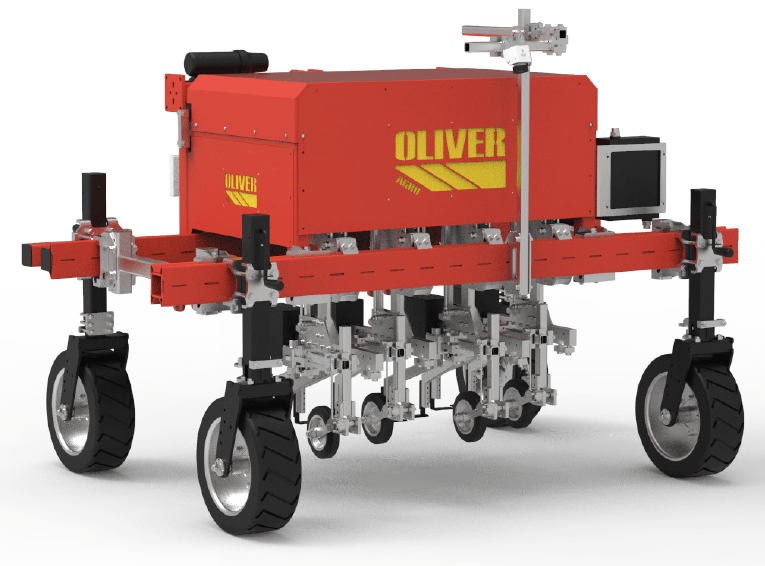
Optyma 2.0 ist unser Unkrautbekämpfungsgerät, Hack-, Zwischenreihen- und Zwischenpflanzenautomat mit automatischer Steuerung und Abständen ab 17 cm zwischen den Reihen. Es zeichnet sich durch seine Benutzerfreundlichkeit aus, dank eines Pflanzenerkennungssystems mittels optischer Fasersensoren. Mit OPTYMA können wir das Jäten zwischen den Reihen und den Pflanzen durchführen, ohne zweimal über dieselbe Stelle gehen zu müssen.
- Praktisch und zuverlässig;
- Flexibel, mit mehreren Konfigurationen;
- Unkrautbekämpfungsmittel;
- Erhöht die Belüftung des Wurzelsystems der Pflanze;
- Krustenbrecher
- Durchschnittliche Arbeitsgeschwindigkeit von 1,2 bis 1,5 km/h;
- Mindestreihenabstand von 17 cm, minimale Pflanzabstand von 15 cm.
- Aktive Unkrautbekämpfung bis zu einer Tiefe von 2/3 cm
Unseres Hacksystem Optyma 2.0 wurde speziell für Kopf- und Blattgemüse wie Salat, Radicchio, Brokkoli, Blumenkohl, Hanf, Mangold und transplantierten Zwiebeln entwickelt, die auf jedem Transplantat oder auf einer Ebene gesät werden.
Folgende Anforderungen sind erforderlich: Bodenvorbereitung mit einer Baulatrice oder Interassassi und einer glatten Walze zur Verdichtung und Nivellierung des Bodens, auch zum Zeitpunkt der Transplantation/Aussaat.
Sie wurde hauptsächlich für die Arbeit in einem frühen vegetativen Stadium entwickelt, um Unkrautbefall vorzubeugen. Das Maschinenkonzept ermöglicht es, 10 Tage nach der Pflanzung in das Kulturbeet einzutreten und eine vollständige Reinigung auch im Zwischenpflanzenbereich zu gewährleisten.